どうやってさまざまな走行条件を再現するのか
実験室内において、実車に対してさまざまな入力ができるRC-Sであれば、ローコストに実車による挙動が確認できる。極論すれば、朝はサーキットでテスト、午後には雪道でテストといった物理的には不可能なことがRC-Sを使えばできるという。

具体的には、駆動系由来の共振といった症状をモーター制御によって改善できるという。その手法について、今回の発表では数式ベースの説明があった。難しい数式は置いておいて、簡単にいえば振動と逆方向の力をモーター制御で発生させることで、振動を抑制するという。考え方としては、ノイズキャンセリングイヤホンが騒音と逆位相の音を出すことでノイズを打ち消しているのと似ている。
藤本教授が長年研究しているインホイールモーターであれば、サスペンションを上下に動かす力も発生できるため、モーターだけでアクティブサスペンションを実現することも可能で、乗り心地が大幅に良くなる可能性があるという。アクティブサスペンション制御を加えることでタイヤの接地状態が改善するため、トータルでは電費の向上につながる可能性もあるというから注目だ。
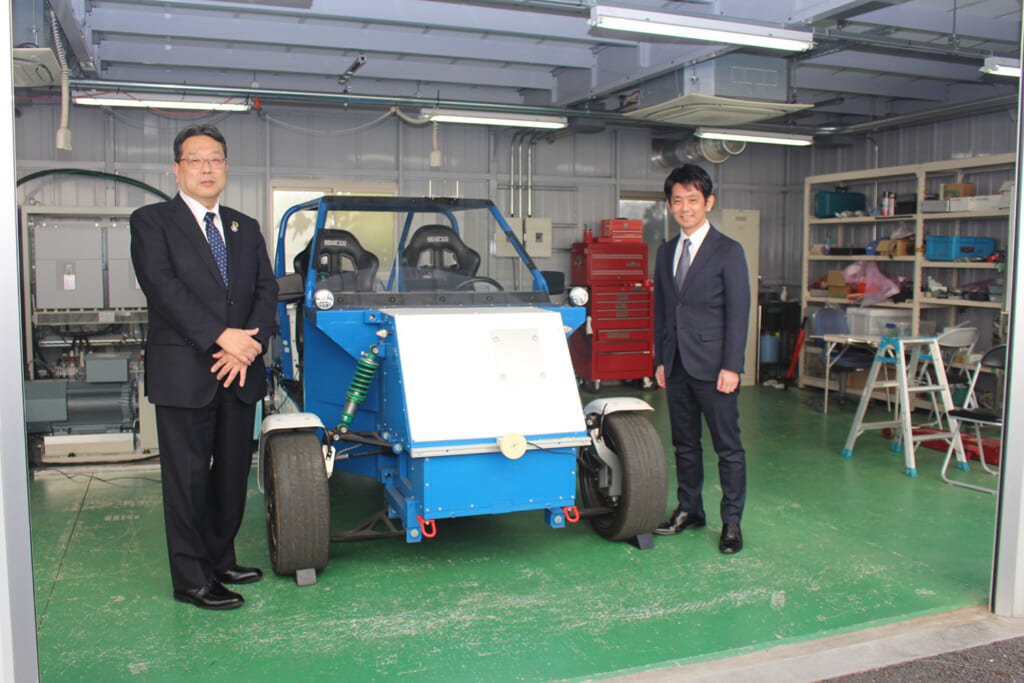
今回の発表では、インホイールモーターの実験車両を使い、低ミュー路におけるモーターの高応答性を活かしたトラクションコントロール制御のデモが実施された。

デモ走行では、雪道を模した路面に片側だけを載せ、サマータイヤで発進する様子を見ることができた。制御なしでは駆動輪であるフロントが空転するが、トラクションコントロール制御を入れると、タイヤがしっかりと路面を捉えて駆動を伝えている。

こうしたトラクションコントロール制御は、エンジン車でも珍しくないが、量産車ではタイヤのスリップ検知にABSセンサーを使っている。一方、藤本研究室ではモーター軸の回転を見ているため、スリップ検知の精度が段違いとなっている。さらにエンジンとモーターの応答性における違いもある。圧倒的にポテンシャルが違うのだ。
だからこそ、台上試験装置にも高精度が求められる。そして、小野測器のRC-Sは電動車両のレスポンスを引き出す制御を実現する性能を持っている。それが、こうした研究成果につながっているのだろう。

さらに、小野測器と東京大学による社会連携講座の第二期(2026年4月~)では、RC-S(台上試験装置)の精度を高めるための改良も研究されるという。計測器を構成する機械部分のガタと、電気信号の遅れを解消する制御を入れることで、より高精度なシミュレーションが可能になることが期待できる。
そこで得た知見は、小野測器が2027年9月稼働を目指して建設中の実験拠点「中部リンケージコモンズ」の設置される試験装置に実装される予定という。まさに社会に貢献する企業と大学の連携講座なのである。