応答遅れの少なさが安全性と使いやすさに繋がる
逆にいえば、穏やかな走りを求めるようなアクセルペダルのわずかな操作に対しては、あえて性能を抑える制御とすることにより、ゆっくり滑らかに走り出させることができる。しかも、モーター制御はエンジンに比べ100分の1の速さで実行できるため、ゆっくりだけれども遅れのない発進や加速をもたらす。
それは、「運転しやすいのに怖くない走り」という実感をもたらす。たとえば、路地や駐車場から通りへ出る際、左右の様子を見ながらアクセルペダルをわずかに踏み込めば、安全を確認したその瞬間に行動を起こすことができるようになる。そこにもし遅れがあれば、動き出すまでのわずかな時間に自転車などが接近してくるような可能性もある。しかし、EVなら安全を確認した好機に発進することができ、より安心で安全な発進をできることになる。

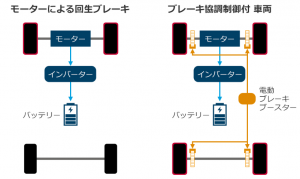
同じことは減速での回生でもいえる。アクセルペダルを一気に全閉へ戻せば、強烈な減速度で回生が機能する。一方、ゆっくりわずかにペダルを戻す操作であれば、走行速度の微調整に役立てられる。ここでも、モーター特有の遅れのない応答が助けになる。
モーターのよさは電気で作動する点にあり、その電気は制御でも利用される。電気だけですべて管理できるということが重要で、対するエンジンも電気制御を使うが、最終的にエンジンを動かすのは燃料を燃やした気体の膨張という物理現象を利用するので、遅れが出るのは仕方がない。燃料をエンジンに供給したからといって、瞬時にトルクに変えることが難しいのである。
エンジンの回転力(トルク)の特性をグラフで表すと山なりの曲線を描くのはそのためである。かたや、モーターのトルク特性は回転数とともに横一直線で、やがて数値が落ちてくる様子になることからも違いを確認できる。

EVの利点が単に排気ゼロで環境性能に優れることにとどまらず、人間の感覚や交通の流れに対して運転のしやすさを生むということもモーター特性のおかげであり、それはすべて電気で賄われていることを背景とし、それがまた自動運転の実現へもつながっていくのである。